Abstract
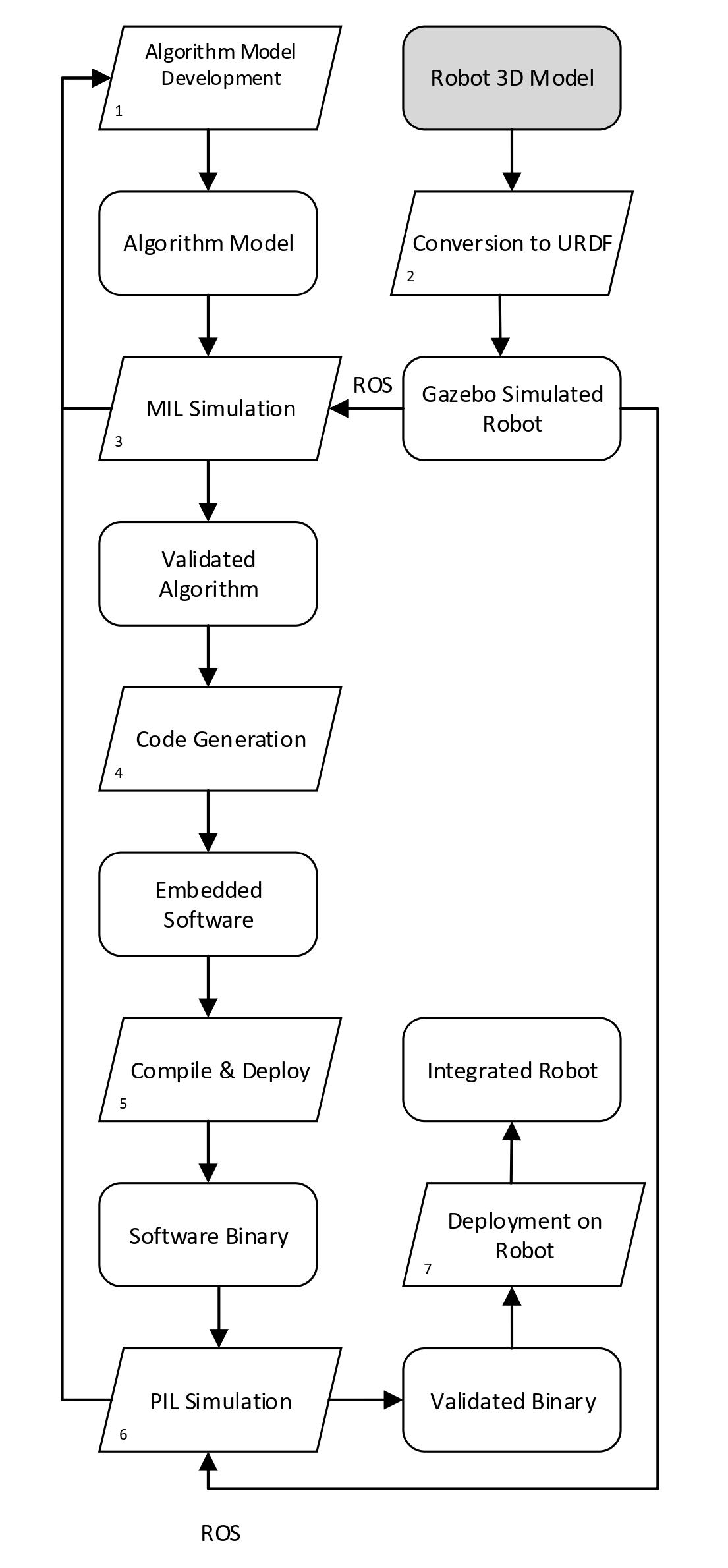
Our design flow’s well-organized steps aim to minimize the potential issues of the software before the final implementation as well as the total development time. The proposed design flow devises a clear interface between the mechanics/hardware and the controller/software teams and is capable of being used in a wide range of robotic applications. Using our design flow, controllers can be developed thoroughly without the necessity of code adjustment. We demonstrate the applicability of our design flow using a synthetic case study and a real-world in-house mobile robot.
Design Flow
BUG2 MIL Testing on a Three-wheel Omni-directional Robot